Example 04: Optical Raytracing (Advanced)
This example demonstrates advanced coordinate frame usage in optical raytracing. We’ll trace parallel rays through lens surfaces and see how frame transformations simplify optical system design.
Key demonstrations:
Frame transformations simplify optics: Position/rotate lenses by modifying frames - the raytracing algorithm stays unchanged
Interchangeable profiles: Swap optical surfaces (spherical, hyperbolic) without changing the tracing code
Note: This is a simplified raytracer for demonstration. Production implementations would handle:
Rays missing the surface (returns error instead of graceful fallback)
Rays starting inside the surface
Numerical stability near grazing incidence
concave surfaces
TL;DR - The Key Insight
If you’re skipping the technical details, here’s what matters:
Scenario: We want to trace light rays through a lens. The lens can be perfectly aligned or tilted at some angle.
The traditional approach: Manually rotate all geometric calculations - intersection points, surface normals, ray directions - every time you change the lens orientation. Error-prone and tedious.
The hazy approach: Put the lens in its own coordinate frame. All geometric calculations happen in the lens’s local frame. Want to tilt the lens 5°? Change one line:
# Aligned lens
lens_frame = root.make_child("lens").translate(x=-25)
# Tilted lens - ONLY the frame definition changes!
lens_frame = root.make_child("lens").translate(x=-25).rotate_euler(y=5, degrees=True)
The entire raytracing algorithm (intersection finding, refraction, propagation) stays completely unchanged. Scroll down to see this in action with spherical and hyperbolic lenses.
Setup
[1]:
from __future__ import annotations
from collections import defaultdict
from dataclasses import dataclass, field
from typing import Callable
import matplotlib.pyplot as plt
import numpy as np
from scipy.optimize import brentq
from hazy import Frame, Point, Vector
Define optical primitives
We need classes for rays, ray history tracking, and axisymmetric surfaces (rotationally symmetric around the optical axis).
[2]:
@dataclass
class RayState:
"""Snapshot of ray state at a point in space.
Args:
point: Position in global coordinates
direction: Direction vector in global coordinates
"""
point: Point
direction: Vector
@dataclass
class RayHistory:
"""Tracks ray trajectory through optical system."""
history: list[RayState] = field(default_factory=list)
def append(self, ray: Ray) -> RayHistory:
"""Add ray state to history (converts to global coordinates).
Args:
ray: Ray to record
Returns:
Self for method chaining
"""
self.history.append(
RayState(point=ray.origin.to_global(), direction=ray.direction.to_global())
)
return self
def plot(self, ax, **plot_args):
"""Plot ray trajectory.
Args:
ax: Matplotlib 3D axis
**plot_args: Additional plotting arguments (color, linewidth, etc.)
"""
points = np.array([p.point for p in self.history])
ax.plot(*points.T, **plot_args)
@dataclass(frozen=True)
class Ray:
"""Immutable ray with origin and direction.
Rays are geometric primitives similar to Points and Vectors.
All operations return new Ray instances.
Args:
origin: Ray starting point
direction: Ray direction (automatically normalized)
"""
origin: Point
direction: Vector
def __post_init__(self):
object.__setattr__(self, "direction", self.direction.copy().normalize())
def to_frame(self, frame: Frame) -> Ray:
"""Transform ray to different coordinate frame.
Args:
frame: Target coordinate frame
Returns:
New ray in target frame
"""
return Ray(
origin=self.origin.to_frame(frame), direction=self.direction.to_frame(frame)
)
def to_global(self) -> Ray:
"""Transform ray to global coordinates.
Returns:
New ray in global frame
"""
return Ray(origin=self.origin.to_global(), direction=self.direction.to_global())
def propagate(self, t: float) -> Ray:
"""Propagate ray along direction.
Args:
t: Distance to propagate
Returns:
New ray at propagated position
"""
return Ray(origin=self.origin + self.direction * t, direction=self.direction)
def refract(self, normal: Vector, n1: float, n2: float) -> Ray | None:
"""Refract ray at surface using Snell's law (vector form).
Args:
normal: Surface normal (pointing toward incident medium)
n1: Refractive index of incident medium
n2: Refractive index of transmitted medium
Returns:
Refracted ray, or None if total internal reflection
Examples:
>>> ray_refracted = ray.refract(normal, n1=1.0, n2=1.5)
"""
normal = normal.to_frame(self.direction.frame).copy().normalize()
ratio = n1 / n2
cos_i = -self.direction.dot(normal)
# Flip normal if ray hits from behind
if cos_i < 0:
normal = -normal
cos_i = -cos_i
sin2_t = ratio**2 * (1 - cos_i**2)
# Total internal reflection
if sin2_t > 1:
return None
cos_t = np.sqrt(1 - sin2_t)
# Snell's law (vector form)
d_refracted = ratio * self.direction + (ratio * cos_i - cos_t) * normal
return Ray(
origin=self.origin.copy(), direction=self.origin.frame.vector(d_refracted)
)
[3]:
@dataclass
class AxisymmetricSurface:
"""Rotationally symmetric surface defined by 1D profile x = f(r).
Coordinate system:
- x: optical axis
- r = sqrt(y^2 + z^2): radial distance from axis
The surface is created by revolving the 2D profile around the x-axis.
Args:
frame: Local coordinate frame of the surface
profile: Function mapping radial distance to axial position: x = f(r)
aperture_radius: Maximum radial extent of the surface
profile_derivative: Optional derivative dx/dr for faster normal computation
"""
frame: Frame
profile: Callable[[np.ndarray], np.ndarray]
aperture_radius: float
profile_derivative: Callable[[np.ndarray], np.ndarray] | None = None
def evaluate(self, r: np.ndarray) -> np.ndarray:
"""Evaluate profile at radial positions.
Args:
r: Radial distance(s) from optical axis
Returns:
Axial position(s) x = f(r)
"""
return self.profile(np.asarray(r))
def intersect(self, ray: Ray) -> tuple[float, Point, Vector]:
"""Find ray-surface intersection.
Strategy: Transform the ray to the optics local coordinate system (frame).
Reduce the problem to 2d by exploiting rotational symmetry of the optical element in its frame.
Args:
ray: Incident ray
Returns:
Tuple of (propagation distance, intersection point, surface normal)
or None if no intersection exists
"""
local_ray = ray.to_frame(self.frame)
def objective_function(t: float) -> float:
point = local_ray.origin + t * local_ray.direction
r = np.sqrt(point.y**2 + point.z**2)
if r > self.aperture_radius:
return 1e10 if t > 0 else -1e10
x_surface = self.profile(np.array([r]))[0]
if np.isnan(x_surface):
return 1e10 if t > 0 else -1e10
return point.x - x_surface
# Search for sign change between t=0 and t=100
try:
t_hit, res = brentq(
objective_function, 1e-3, 100.0, xtol=1e-10, full_output=True
)
except ValueError as err:
raise ValueError(
"No valid intersection between ray and surface found"
) from err
propagated_ray = local_ray.propagate(t_hit)
hit_local = propagated_ray.origin.to_frame(self.frame)
# Compute surface normal in local frame
normal_local = self.normal_at(hit_local)
return t_hit, hit_local, normal_local
def normal_at(self, point: Point) -> Vector:
"""Compute outward surface normal at point.
Args:
point: Surface point (in surface frame)
Returns:
Outward-pointing unit normal vector
"""
p = point.to_frame(self.frame)
r = np.sqrt(p.y**2 + p.z**2)
# On-axis: normal points along -x
if r < 1e-12:
return self.frame.vector(-1.0, 0.0, 0.0)
# Compute derivative dx/dr
if self.profile_derivative is not None:
dxdr = self.profile_derivative(np.array([r]))[0]
else:
# Numerical derivative
eps = 1e-8
dxdr = (
self.profile(np.array([r + eps]))[0]
- self.profile(np.array([r - eps]))[0]
) / (2 * eps)
# Normal in cylindrical coordinates: (-1, dx/dr * y/r, dx/dr * z/r)
return self.frame.vector(-1.0, dxdr * p.y / r, dxdr * p.z / r).normalize()
def plot_profile(self, ax=None, n_points: int = 500, **kwargs):
"""Plot 2D profile in meridional plane.
Args:
ax: Matplotlib axis (creates new if None)
n_points: Number of points to plot
**kwargs: Additional plot arguments
Returns:
Matplotlib axis
"""
if ax is None:
fig, ax = plt.subplots(figsize=(8, 6))
y = np.linspace(-self.aperture_radius, self.aperture_radius, n_points)
x = self.profile(np.abs(y))
defaults: dict = {"linewidth": 2}
defaults.update(kwargs)
ax.plot(x, y, **defaults)
ax.set_xlabel("x (optical axis)")
ax.set_ylabel("y (radial)")
ax.set_aspect("equal")
ax.grid(True, alpha=0.3)
return ax
def plot_surface(
self, ax=None, n_radial: int = 50, n_azimuthal: int = 60, **surface_kwargs
):
"""Plot revolved 3D surface.
Args:
ax: Matplotlib 3D axis (creates new if None)
n_radial: Number of radial sample points
n_azimuthal: Number of azimuthal sample points
**surface_kwargs: Additional surface plot arguments
Returns:
Matplotlib 3D axis
"""
if ax is None:
fig = plt.figure(figsize=(10, 8))
ax = fig.add_subplot(111, projection="3d")
# Generate surface mesh
r = np.linspace(0, self.aperture_radius, n_radial)
phi = np.linspace(0, 2 * np.pi, n_azimuthal)
r_grid, phi_grid = np.meshgrid(r, phi)
# Convert to Cartesian in surface frame
y_grid = r_grid * np.cos(phi_grid)
z_grid = r_grid * np.sin(phi_grid)
x_grid = self.profile(r_grid)
shape = x_grid.shape
# Transform to global coordinates
x, y, z = self.frame.batch_transform_points_global(
np.stack([x_grid.ravel(), y_grid.ravel(), z_grid.ravel()], axis=-1)
).T
defaults = {"alpha": 0.3, "edgecolor": "none"}
defaults.update(surface_kwargs)
ax.plot_surface(
x.reshape(shape), y.reshape(shape), z.reshape(shape), **defaults
)
ax.set_xlabel("x (optical axis)")
ax.set_ylabel("y")
ax.set_zlabel("z")
return ax
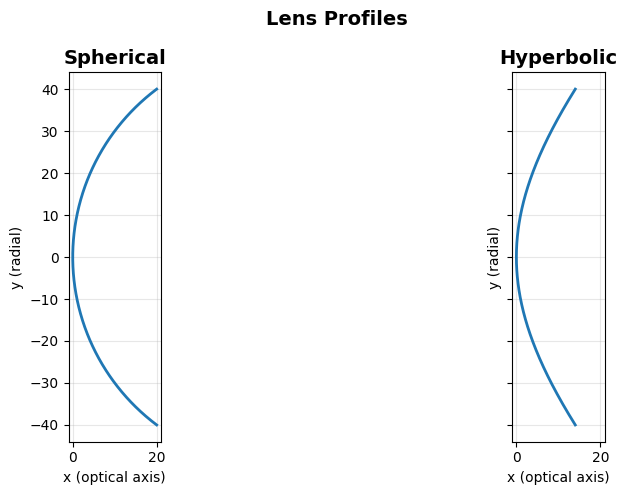
Surface profile functions
Optical surfaces are defined by 1D profiles x = f(r) that are revolved around the x-axis (optical axis).
[4]:
def spherical_profile(
R: float,
) -> tuple[Callable[[np.ndarray], np.ndarray], Callable[[np.ndarray], np.ndarray]]:
"""Create spherical surface profile and its derivative.
Args:
R: Radius of curvature
R > 0: convex (bulging toward +x)
R < 0: concave (bulging toward -x)
Returns:
Tuple of (profile function, derivative function)
Examples:
>>> profile, deriv = spherical_profile(R=50)
>>> x = profile(np.array([0, 10, 20])) # x positions at r = 0, 10, 20
"""
def profile(r: np.ndarray) -> np.ndarray:
r = np.asarray(r)
arg = R**2 - r**2
valid = arg >= 0
x = np.full_like(r, np.nan, dtype=float)
x[valid] = R - np.sign(R) * np.sqrt(arg[valid])
return x
def derivative(r: np.ndarray) -> np.ndarray:
r = np.asarray(r)
arg = R**2 - r**2
valid = arg > 0
dxdr = np.full_like(r, np.nan, dtype=float)
dxdr[valid] = r[valid] / (np.sign(R) * np.sqrt(arg[valid]))
return dxdr
return profile, derivative
def hyperbolic_profile(
R: float, conic_constant: float = -2.0
) -> tuple[Callable[[np.ndarray], np.ndarray], Callable[[np.ndarray], np.ndarray]]:
"""Create hyperbolic surface profile and its derivative.
General conic surface: x = (r^2/R) / (1 + sqrt(1 - (1+K)*(r/R)^2))
where K is the conic constant.
For K < -1: hyperbola (stronger curvature at edges than sphere)
For K = -1: parabola
For -1 < K < 0: ellipse
For K = 0: sphere
Args:
R: Radius of curvature at apex (r=0)
conic_constant: K value (default -2.0 for hyperbola)
Returns:
Tuple of (profile function, derivative function)
Examples:
>>> profile, deriv = hyperbolic_profile(R=25, conic_constant=-2.0)
>>> x = profile(np.array([0, 10, 20]))
"""
def profile(r: np.ndarray) -> np.ndarray:
r = np.asarray(r)
r2 = r**2
arg = 1 - (1 + conic_constant) * r2 / (R**2)
valid = arg > 0
x = np.full_like(r, np.nan, dtype=float)
x[valid] = r2[valid] / (R * (1 + np.sqrt(arg[valid])))
return x
def derivative(r: np.ndarray) -> np.ndarray:
r = np.asarray(r)
r2 = r**2
arg = 1 - (1 + conic_constant) * r2 / (R**2)
valid = arg > 0
dxdr = np.full_like(r, np.nan, dtype=float)
sqrt_arg = np.sqrt(arg[valid])
denominator = R * (1 + sqrt_arg) ** 2
numerator = (
2
* r[valid]
* (1 + sqrt_arg + (1 + conic_constant) * r2[valid] / (2 * R**2 * sqrt_arg))
)
dxdr[valid] = numerator / denominator
return dxdr
return profile, derivative
fig, axs = plt.subplots(1, 2, sharex=True, sharey=True, figsize=(12, 5))
fig.suptitle("Lens Profiles", fontsize=14, fontweight="bold")
root = Frame.make_root("dummy-frame")
axs[0].set_title("Spherical", fontsize=14, fontweight="bold")
profile, profile_derivative = spherical_profile(R=50)
AxisymmetricSurface(
frame=root,
profile=profile,
profile_derivative=profile_derivative,
aperture_radius=40,
).plot_profile(axs[0])
axs[1].set_title("Hyperbolic", fontsize=14, fontweight="bold")
profile, profile_derivative = hyperbolic_profile(R=50)
AxisymmetricSurface(
frame=root,
profile=profile,
profile_derivative=profile_derivative,
aperture_radius=40,
).plot_profile(axs[1])
plt.tight_layout()
Raytracing function
This function traces parallel rays through a surface, showing the 3D trajectory and final footprint.
[5]:
def trace_rays_through_surface(
surface: AxisymmetricSurface,
n_rays: int = 10,
inner_radius: float = 10.0,
outer_radius: float = 20.0,
n1: float = 1.0,
n2: float = 1.5,
final_x: float = 38.0,
) -> tuple[dict[int, RayHistory], tuple]:
"""Trace parallel rays through an optical surface.
Args:
surface: Optical surface to trace through
n_rays: Number of rays to trace
inner_radius: Radial distance of inner ray bundle from optical axis
outer_radius: Radial distance of outer ray bundle from optical axis
n1: Refractive index before surface
n2: Refractive index after surface
final_x: Final x position to propagate rays to
Returns:
Tuple of (ray histories dict, (fig, ax_3d, ax_2d))
"""
fig = plt.figure(figsize=(14, 6))
ax_3d = fig.add_subplot(121, projection="3d")
ax_2d = fig.add_subplot(122)
# Plot surface
surface.plot_surface(ax_3d)
ax_3d.set_title("3D Ray Trace", fontsize=14, fontweight="bold")
ax_3d.set_xlim(-30, 30)
ax_3d.set_ylim(-30, 30)
ax_3d.set_zlim(-30, 30)
# Generate rays in circular pattern
phis = np.linspace(0, 2 * np.pi, n_rays, endpoint=False)
for radius, cmap in zip([inner_radius, outer_radius], [plt.cm.Reds, plt.cm.Blues]):
rays = defaultdict(RayHistory)
colors = cmap(np.linspace(0.2, 0.8, n_rays))
for i, phi in enumerate(phis):
z = radius * np.cos(phi)
y = radius * np.sin(phi)
# Create initial ray
ray = Ray(surface.frame.root.point(-30, y, z), surface.frame.root.x_axis)
rays[i].append(ray)
# Intersect with surface
t, point, normal = surface.intersect(ray)
ray = ray.propagate(t)
rays[i].append(ray)
# Refract at surface
ray = ray.refract(normal, n1, n2)
rays[i].append(ray)
# Propagate after refraction
final_x_point = (
surface.frame.root.origin + surface.frame.root.x_axis * final_x
)
propagation_distance = surface.frame.root.x_axis.dot(
final_x_point - ray.origin
) / surface.frame.root.x_axis.dot(ray.direction)
ray = ray.propagate(propagation_distance)
rays[i].append(ray)
for (i, ray_history), color in zip(rays.items(), colors):
ray_history.plot(ax_3d, c=color, linewidth=2, alpha=0.8)
# Plot start and end points in 2D (y-z plane)
ax_2d.scatter(
*ray_history.history[0].point[[1, 2]],
color=color,
s=80,
alpha=0.5,
edgecolors="none",
)
ax_2d.scatter(
*ray_history.history[-1].point[[1, 2]],
color=color,
s=80,
edgecolors="black",
linewidth=1.5,
)
ax_2d.set_aspect("equal")
ax_2d.set_xlabel("y", fontsize=12)
ax_2d.set_ylabel("z", fontsize=12)
ax_2d.set_title(
"Ray Footprint (start: faded, end: solid)", fontsize=14, fontweight="bold"
)
ax_2d.grid(True, alpha=0.3)
return rays, (fig, ax_3d, ax_2d)
Example: Raytracing a lens
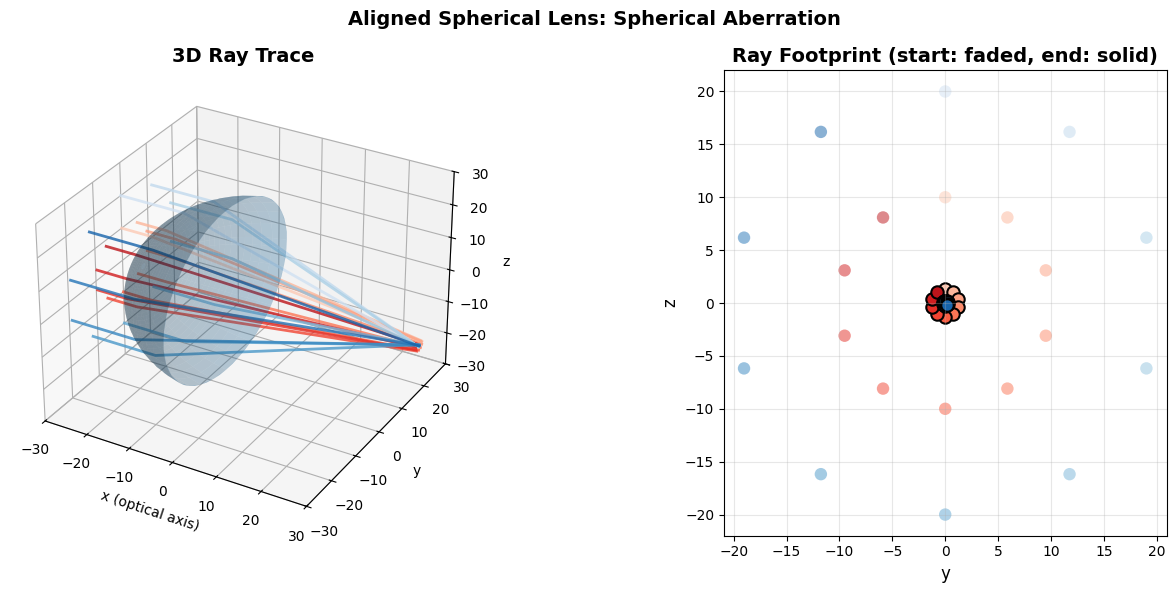
This example demonstrates how coordinate frame transformations simplify optical raytracing.
We’ll trace parallel rays through a spherical lens surface and observe spherical aberration - rays at different radial distances focus at different points.
The key insight: by placing the lens in its own coordinate frame, we can reposition and reorient the entire optical system by changing a single line of code, while all geometric calculations remain unchanged.
Create root frame
[6]:
root = Frame.make_root("root")
Aligned spherical lens
Start with a perfectly aligned spherical lens. Notice the spherical aberration: rays at different radial distances don’t focus to the same point - the footprint spreads out.
[7]:
lens_frame = root.make_child("lens").translate(x=-25)
profile, derivative = spherical_profile(R=25)
surface = AxisymmetricSurface(
frame=lens_frame,
profile=profile,
profile_derivative=derivative,
aperture_radius=40.0,
)
rays, (fig, ax_3d, ax_2d) = trace_rays_through_surface(surface)
fig.suptitle(
"Aligned Spherical Lens: Spherical Aberration", fontsize=14, fontweight="bold"
)
plt.tight_layout()
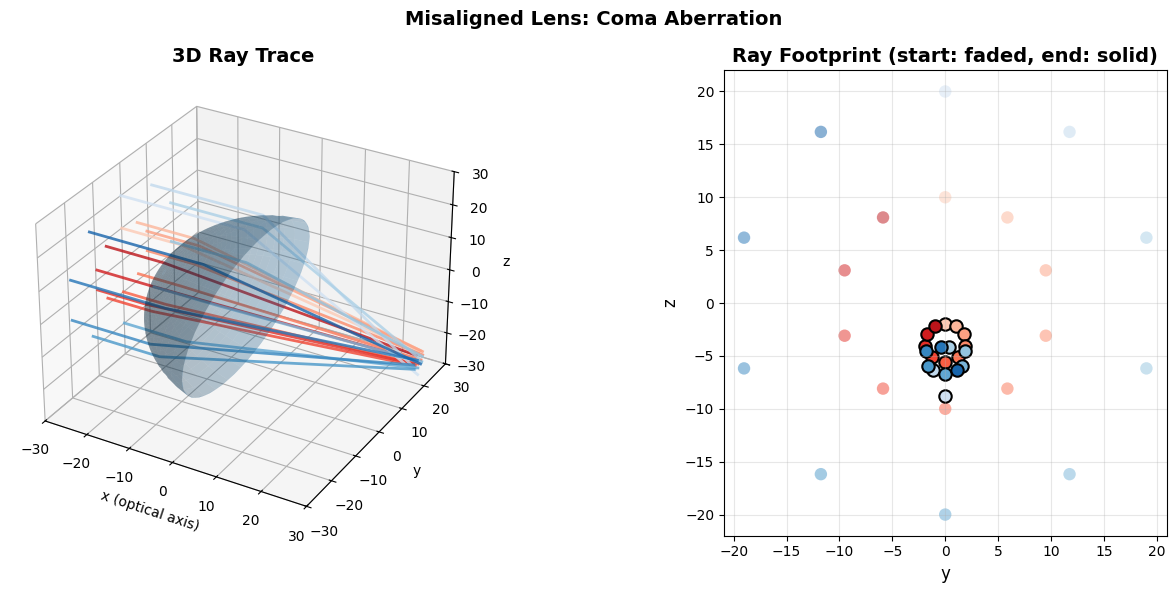
Misalign the lens - only one line changes!
Now rotate the lens 5 degrees around the y-axis. Look closely: Only the lens_frame definition changes - the entire raytracing algorithm (intersection, refraction, propagation) stays identical.
This asymmetry creates coma aberration - the ray footprint becomes comet-shaped. This is a fundamental optical aberration that occurs when lenses are tilted.
[8]:
# Misaligned case: lens rotated 5 degrees
# ↓↓↓ ONLY THIS LINE CHANGES - everything else is identical! ↓↓↓
lens_frame = root.make_child("lens").translate(x=-20).rotate_euler(y=10, degrees=True)
profile, derivative = spherical_profile(R=25)
surface = AxisymmetricSurface(
frame=lens_frame,
profile=profile,
profile_derivative=derivative,
aperture_radius=40.0,
)
rays, (fig, ax_3d, ax_2d) = trace_rays_through_surface(surface)
fig.suptitle("Misaligned Lens: Coma Aberration", fontsize=14, fontweight="bold")
plt.tight_layout()
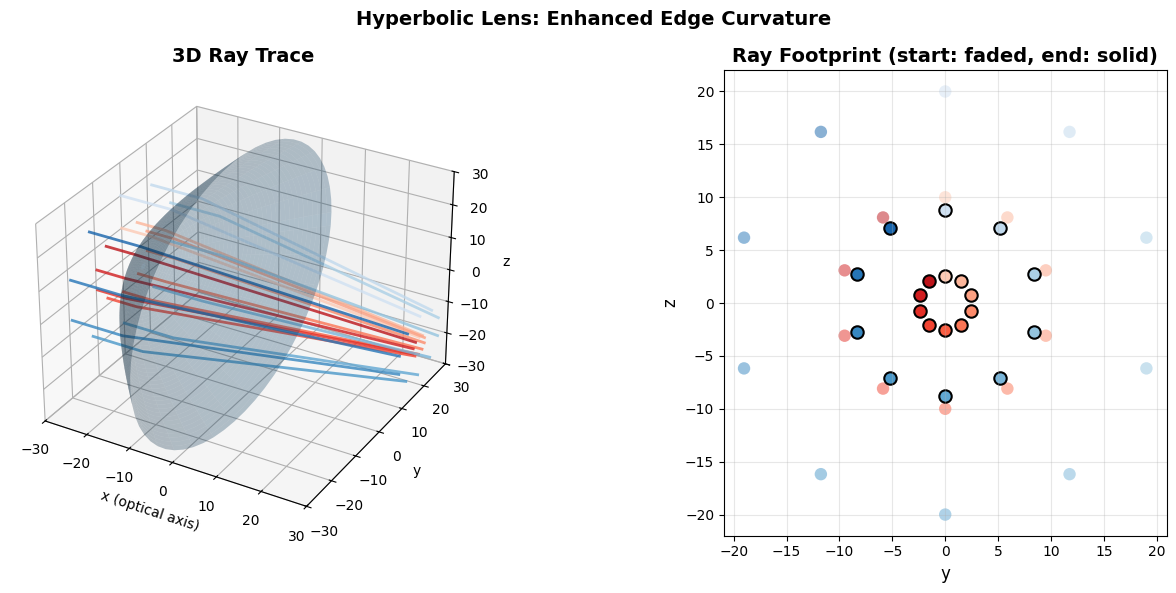
Swap the surface profile - only the profile changes!
Replace the spherical lens with a hyperbolic one. Again, only the profile function changes - frame setup and raytracing code stay identical.
Hyperbolic surfaces (conic constant K < -1) have stronger edge curvature than spheres, which affects how rays are focused. Compare the footprint pattern to the spherical case above.
[9]:
# Hyperbolic lens: different aberration characteristics
# ↓↓↓ ONLY THE PROFILE CHANGES - frame, raytracing, everything else identical! ↓↓↓
lens_frame = root.make_child("hyperbolic_lens").translate(x=-25)
profile, derivative = hyperbolic_profile(R=25, conic_constant=-2)
surface = AxisymmetricSurface(
frame=lens_frame,
profile=profile,
profile_derivative=derivative,
aperture_radius=40.0,
)
rays, (fig, ax_3d, ax_2d) = trace_rays_through_surface(surface)
fig.suptitle("Hyperbolic Lens: Enhanced Edge Curvature", fontsize=14, fontweight="bold")
plt.tight_layout()
Key Takeaways
Frame transformations for optics: Optical elements (lenses, mirrors) live in their own frames. Repositioning or rotating them requires changing only the frame definition - all geometric calculations (intersection finding, normal computation, refraction) work in local coordinates and remain unchanged.
Interchangeable profiles: Each surface profile (spherical, hyperbolic, etc.) is just a function x = f(r). Swapping profiles means changing the function - the AxisymmetricSurface class and raytracing algorithm stay identical. This modularity allows easy exploration of different optical designs.
Immutable rays: Like Point and Vector, Ray is immutable - all operations (propagate, refract, to_frame) return new instances. This matches hazy’s philosophy: geometric primitives are values, not mutable state.
Without hazy: Manually compose transformation matrices for each lens position, track multiplication order for nested frames, explicitly transform every point and vector, rewrite intersection code when repositioning optics.
With hazy: Define surfaces in natural local coordinates (origin=(0,0,0), x-axis = optical axis), modify frames to position/orient elements, call .to_frame() for automatic transformation through arbitrarily deep hierarchies.